В современном мире, где безопасность и эффективность воздушного движения являются критически важными, радиолокационные системы выступают в роли незримых диспетчеров небесных трасс.
Две их основные разновидности — первичная и вторичная радиолокация — функционируют в тесном симбиозе, обеспечивая надежное наблюдение за воздушным пространством. Понимание различий в их физических принципах, достоинствах и ограничениях позволяет оценить сложность организации авиасообщения и увидеть перспективные направления в развитии радиолокационных технологий, которые определят облик систем контроля в ближайшем будущем.
Сущность и принцип работы первичной радиолокации

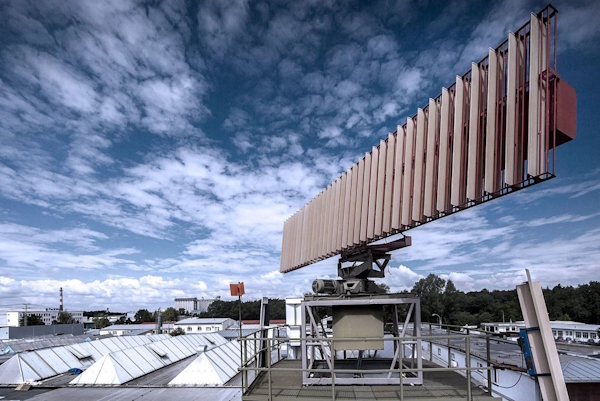
Первичная радиолокация, также известная как пассивная, функционирует по классическому принципу радиолокации: излучение и приём. Радиолокационная станция генерирует мощный короткий импульс электромагнитной энергии и излучает его в пространство с помощью вращающейся антенны с узкой диаграммой направленности.
Если на пути импульса встречается объект, например воздушное судно, часть энергии рассеивается, а малая её доля отражается обратно в сторону станции. Этот отражённый сигнал, называемый эхо-сигналом, улавливается приёмной антенной.
Система измеряет время, прошедшее между излучением импульса и приёмом его отражения. Поскольку скорость распространения радиоволн постоянна и равна скорости света, это время задержки напрямую преобразуется в расстояние до цели. Направление на объект определяется по угловому положению антенны в момент регистрации эхо-сигнала.
Таким образом, на экране оператора формируется отметка, показывающая азимут и дальность до цели. Ключевая особенность ПРЛ — её пассивность по отношению к объекту наблюдения: для обнаружения не требуется никакого специального оборудования или действий со стороны воздушного судна.
Применение и ограничения первичной радиолокации

Основная сфера применения первичной радиолокации — военная и гражданская система контроля воздушного пространства. Она незаменима для обнаружения, сопровождения и определения координат любых объектов в воздухе, независимо от их желания или технической возможности взаимодействовать.
Это позволяет контролировать не только гражданские и военные самолёты, но и беспилотные летательные аппараты, птичьи стаи, метеообразования и даже объекты, не оснащённые транспондерами. В военной сфере ПРЛ является основой систем противовоздушной обороны, обеспечивая обнаружение потенциальных угроз.
Однако у этого метода есть существенные недостатки. Во-первых, мощность отражённого сигнала сильно зависит от эффективной площади рассеяния цели. Малые и изготовленные с использованием стелс-технологий объекты могут остаться незамеченными. Во-вторых, первичный радиолокатор не может идентифицировать цель — оператор видит лишь “неопознанную метку” без данных о бортовом номере, высоте или типе воздушного судна. В-третьих, для обеспечения больших дальностей требуются мощные передатчики, что повышает энергопотребление и может создавать электромагнитные помехи.
Сущность и принцип работы вторичной радиолокации
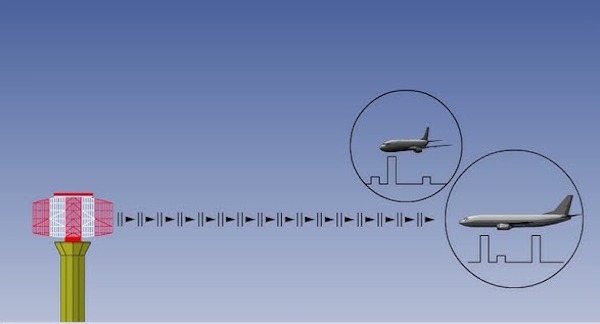
Вторичная радиолокация построена на принципе активного запрос-ответного взаимодействия между наземной станцией и воздушным судном. В отличие от пассивного отражения, здесь цель становится активным участником процесса.
Наземный радиолокационный запросчик излучает в направлении воздушного судна кодированные запросные импульсы на частоте 1030 МГц. На борту воздушного судна установлен прибор, называемый ответчик или транспондер.
Приняв и распознав запрос, транспондер автоматически генерирует и излучает обратно в сторону наземной станции закодированный ответный сигнал на частоте 1090 МГц. Этот сигнал содержит важнейшую информацию, предварительно введённую в транспондер экипажем или бортовыми системами.
Таким образом, вторичный радиолокатор получает не просто факт наличия цели, а пакет цифровых данных от неё самой. Это принципиально отличает ВРЛ от первичной, делая её системой активного сотрудничества, а не пассивного наблюдения.
Применение и стандарты вторичной радиолокации
Вторичная радиолокация является технологическим стержнем организации современного воздушного движения. Главное её применение — режим опознавания “свой-чужой” в военной авиации и режим передачи данных в гражданской.
Гражданский режим (Mode A/C и Mode S) позволяет передавать на землю четырёхзначный бортовой код, присвоенный диспетчером, и данные о барометрической высоте, полученные с бортового альтиметра. Это решает ключевую проблему идентификации.
Более совершенный режим Mode S (Selective — селективный) обеспечивает двусторонний цифровой обмен данными. Каждому воздушному судну присваивается уникальный 24-битный адрес. Запросчик может обращаться к конкретному транспондеру, уменьшая перегрузку эфира, а самолёт может передавать расширенные данные, включая скорость, курс и даже аварийные сигналы.
Основным мировым стандартом вторичной радиолокации сегодня является именно Mode S. Он лежит в основе таких перспективных концепций, как автоматическое зависимое наблюдение — вещание, где самолёт регулярно транслирует свои координаты, полученные от спутниковой навигации (GPS/ГЛОНАСС).
Ключевые различия между первичной и вторичной радиолокацией

Физический принцип является фундаментальным отличием: первичная радиолокация основана на пассивном отражении сигнала от цели, а вторичная — на активном ответе бортового транспондера на наземный запрос. Это влечёт за собой остальные различия.
Тип получаемой информации кардинально разный. ПРЛ предоставляет только пространственные координаты цели (азимут, дальность), в то время как ВРЛ передаёт цифровой пакет данных, включающий идентификатор, высоту и другую информацию с борта.
Зависимость от оборудования на цели критична. Для работы первичного локатора не требуется никакого бортового оборудования, что позволяет обнаруживать любые объекты. Вторичный локатор эффективен только для воздушных судов, оснащённых исправным транспондером, настроенным на правильный код и режим.
Точность и однозначность идентификации также различаются. ПРЛ не может идентифицировать цель, лишь обнаруживая “неопознанную метку”. ВРЛ однозначно идентифицирует воздушное судно по присвоенному коду, что абсолютно необходимо для безопасного управления воздушным движением.
Интеграция систем и совместное применение
В современной системе управления воздушным движением первичная и вторичная радиолокация не конкурируют, а дополняют друг друга, формируя комплексную радиолокационную картину.
Первичный радиолокатор обеспечивает общую ситуационную осведомлённость, обнаруживая все объекты в зоне ответственности, включая те, что не оснащены транспондерами или чьи транспондеры вышли из строя. Это критически важно для безопасности.
Данные от вторичного радиолокатора накладываются на эту картину, обеспечивая каждому обнаруженному и отвечающему воздушному судну цифровую “бирку” с его позывным, высотой и другой информацией. Диспетчер видит не просто метку, а полный набор данных для управления.
Таким образом, ВРЛ обеспечивает эффективное управление известным, кооперативным трафиком, а ПРЛ выступает в роли страховки, обнаруживая некооперативные цели и обеспечивая резервирование на случай сбоя вторичной системы. Это сочетание создаёт отказоустойчивую и надёжную систему наблюдения.
Перспективные наработки: мультистатическая и пассивная радиолокация
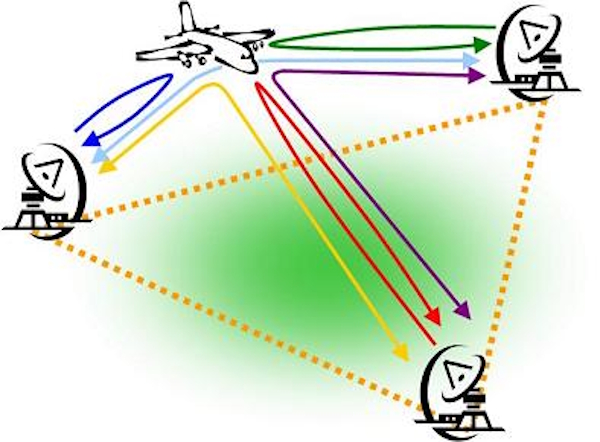
Одним из наиболее перспективных направлений развития первичной радиолокации является мультистатическая радиолокация. В такой системе приёмники сигналов разнесены в пространстве и отделены от одного или нескольких передатчиков.
Это даёт ряд преимуществ: повышается вероятность обнаружения малозаметных целей за счёт анализа отражений под разными углами, улучшается точность определения координат, а сами передатчики могут быть менее мощными или даже использовать сторонние источники излучения (например, сигналы теле- и радиовещания).
Пассивная радиолокация доводит эту концепцию до предела, полностью отказываясь от собственного передатчика. Она использует для освещения цели случайные сигналы от существующих источников — сотовых вышек, цифрового телевидения (DVB-T), сигналов спутниковой навигации или FM-радиостанций.
Такие системы обладают высокой скрытностью (не излучают сами), энергоэффективностью и способны обнаруживать даже стелс-объекты. Их сложность заключается в необходимости сложной обработки слабых отражённых сигналов на фоне мощных прямых и в точной синхронизации разнесённых приёмников.
Эволюция вторичной радиолокации: ADS-B и многоадресность
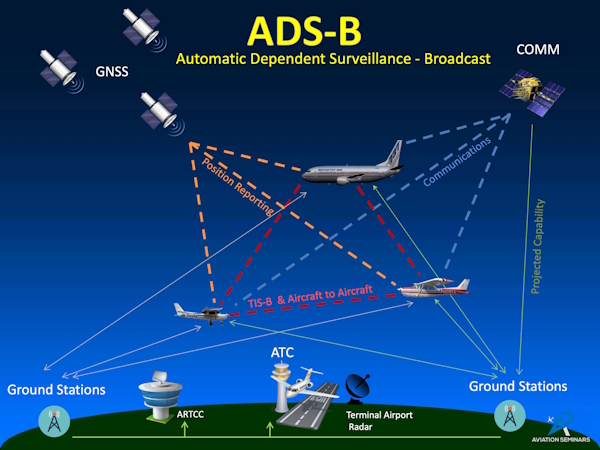
В области вторичной радиолокации магистральным путём развития стало автоматическое зависимое наблюдение — вещание. Это технология, при которой воздушное судно не ждёт запроса с земли, а регулярно и автоматически транслирует пакет данных, включающий свои точные координаты, полученные от спутниковой навигационной системы.
ADS-B — это технология, при которой самолёт сам автоматически и постоянно «вещает» или «твитит» о своём положении в эфир. Он не ждёт запроса от радара, а использует данные GPS, чтобы каждую секунду передавать в окружающее пространство пакет информации: точные координаты, высоту, скорость и бортовой номер.
Сигналы ADS-B принимаются не только специализированными наземными станциями, но и другими воздушными судами, что повышает осведомлённость экипажей об окружающей обстановке. Технология обеспечивает более высокую точность и обновляемость данных по сравнению с классической ВРЛ.
Следующим шагом является внедрение режима многоадресной передачи данных в рамках протокола Mode S. Это позволит передавать информацию не по принципу “запрос-ответ” или “вещание”, а направленно — определённой группе абонентов, что оптимизирует использование радиочастотного ресурса и снизит загрузку каналов связи в районах с плотным воздушным движением.
Интеграция с другими технологиями и обработка данных
Будущее радиолокации лежит не в изолированном развитии отдельных систем, а в их глубокой интеграции с другими источниками данных и применении передовых алгоритмов обработки.
Современные системы стремятся объединить информацию от первичных и вторичных радиолокаторов, сетей ADS-B, спутникового мониторинга, оптико-электронных станций и даже данных от самих воздушных судов (например, через спутниковую связь).
Обработка этого массива разнородной информации требует применения технологий искусственного интеллекта и машинного обучения. Алгоритмы учатся автоматически классифицировать цели (самолёт, вертолёт, БПЛА, птица), выявлять нештатные ситуации, прогнозировать траектории движения и формировать единую, непротиворечивую картину воздушной обстановки в реальном времени.
Такой комплексный, сетевой подход превращает радиолокацию из простого инструмента измерения координат в интеллектуальную систему ситуационной осведомлённости, способную самостоятельно анализировать угрозы и поддерживать принятие решений человеком-оператором.
Таким образом, развитие радиолокации идёт по пути создания распределённых, гибких и умных сетей наблюдения, где классические методы органично сочетаются с новейшими технологиями для обеспечения беспрецедентного уровня безопасности и эффективности в небе.

Я, Ирина Петрова-Левин, выпускница Московского Технического Университета Связи и Информатики, где получила образование в области информационных технологий. Мой профессиональный путь связан с JavaScript, PHP и Python, а также с глубоким интересом к тому, как современные технологии влияют на повседневную жизнь. Я стараюсь объяснять сложные процессы так, чтобы они становились понятными каждому, без потери точности и сути.
С 2019 года живу в Далласе, что позволяет мне сочетать опыт российской инженерной школы с американским технологическим подходом. В своих материалах я стремлюсь показывать реальные механизмы работы технологий и предметов вокруг нас, делая информацию одновременно доступной, практичной и структурированной.





